Research & Development
Identify core IoT technologies for eco-friendly, reliable solutions through edge computing to foster R&D and address challenges.
Edge Computing
These technologies target on addressing challenges reliable IoT, Eco-friendly IoT and easy to develop IoT together by giving solutions through edge computing.
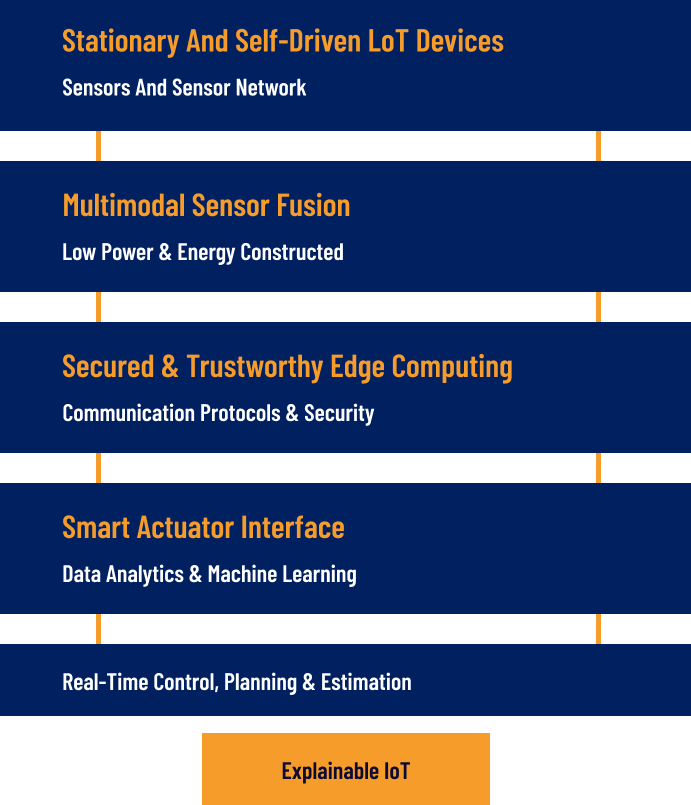
Multidisciplinary Tech
The multi-disciplinary technical verticals of IoT are Sensors & sensor network, Low power & energy constrained devices, Communication protocol & security, Data analytics & machine learning and Real-time control, & estimation.
Multidisciplinary Expertise
Innovative and distinct technologies that have large impact through its applicability in multiple use-case and aimed at building core and unique multidisciplinary expertise.
Cloud Computing
While solving the problems through edge computing, the carbon footprint is likely to have significant reduction as compared to the cloud computing methods.